

| 제목 | [시장분석] 자동차 분야_ 4D FMCW 라이다 신호처리 소프트웨어 시장분석 |
|---|
| 분류 | 성장동력산업 | 판매자 | 나혜선 | 조회수 | 91 | |
|---|---|---|---|---|---|---|
| 용량 | 1.24MB | 필요한 K-데이터 | 7도토리 |
| 파일 이름 | 용량 | 잔여일 | 잔여횟수 | 상태 | 다운로드 |
|---|---|---|---|---|---|
| 1.24MB | - | - | - | 다운로드 |
| 데이터날짜 : | 2023-01-11 |
|---|---|
| 출처 : | 국책연구원 |
| 페이지 수 : | 27 |
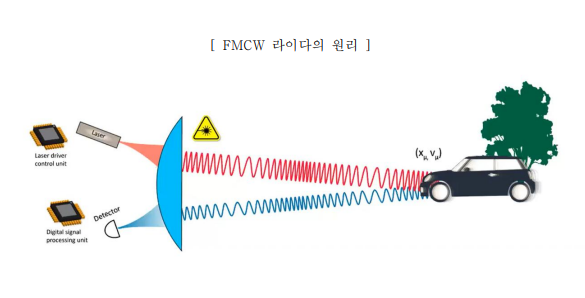
4D FMCW 라이다 신호처리 어플리케이션 소프트웨어란 거리, 속도, 각도, 고도에 해당하는 4D를 측정하기 위해서 주파수 변조 연속파인 FMCW(Frequency Modulated Continuous Wave) 적외선 파장대역의 광을 사용하여 물체를 감지해내는 LiDAR(Light Detection And Range)용 신호처리 어플리케이션 소프트웨어로서 자율주행 자동차 등에 사용되는 핵심 제품 및 기술임
▪라이다는 적외선 파장대역의 레이저를 송출한 후 목표물에서 반사한 신호를 수신할 때까지 비행 시간(Time-of-Flight, ToF)을 측정하고, 빛의 속도를 기반으로 목표물까지 거리를 계산
▪FMCW 방식의 라이다는 송신부는 레이저를 송출하여 만드는 파형의 주파수를 변조하면서 연속으로 레이저 신호를 송출하며, 수신부는 반사파를 검출하여 현재 송출하는 파형의 주파수 차이를 이용하여 거리를 계산
▪4D FMCW 라이다는 주파수 변조된 신호와 광신호를 송수신하는 방식으로 기존 라이다의 문제점으로 판단되고 있는 태양광으로부터의 간섭문제를 해결할 수 있으며, 그 외에도 자율주행자동차가 운행하는 실 도로에서의 열악한 주행조건으로부터도 높은 신호 수신율 보장
4D 라이다는 집중화된 레이저 펄스를 사용하여 측정 방향(Bearing Direction)에 대하여 이산적인 거리 측정이 가능하며 FMCW 방식은 10MHz ~ 100MHz 정도로 주파수를 변조하는 연속파를 사용하여, 변조 가능한 신호 세기와 주파수 범위에 따라 자동차 측정 환경에 적용 가능
4D 라이다는 측정 방향의 시야각(Field of View, FoV)에 레이저 신호를 확산 송출한 후 개별 수신 소자에서 거리 측정이 가능한 다중 배열 수신 소자인 FPA(Focal Plane Array)를 이용하므로 측정 방향별로 거리를 측정하여 측정 방향의 개수와 상관없이 측정이 가능
4D FMCW 라이다는 요소부품의 기술적 특징에 따라 Photodetector, IC, Laser source, Optical Element, lidar module housing으로 구분함
※ 본 서비스에서 제공되는 각 저작물의 저작권은 자료제공사에 있으며 각 저작물의 견해와 DATA 365와는 견해가 다를 수 있습니다.